Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
FRC got me interested in engineering when I was in high school. Now I’ve finally returned to mentor. I like to inspire my students to aim high, build wacky machines, and be good members of society.
These are some of the small rovers test platforms I’ve built for my graduate research… click here for some images. 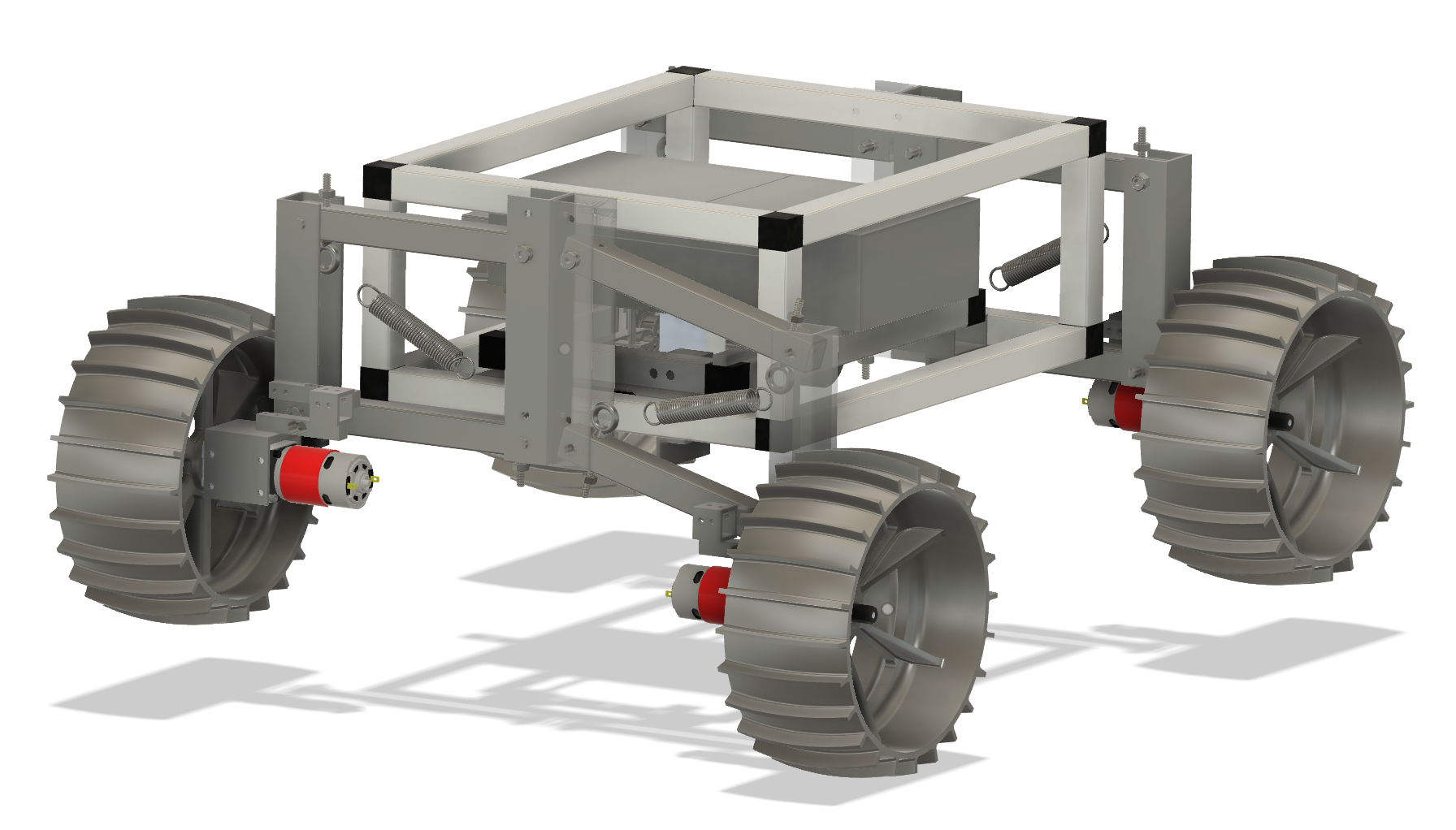
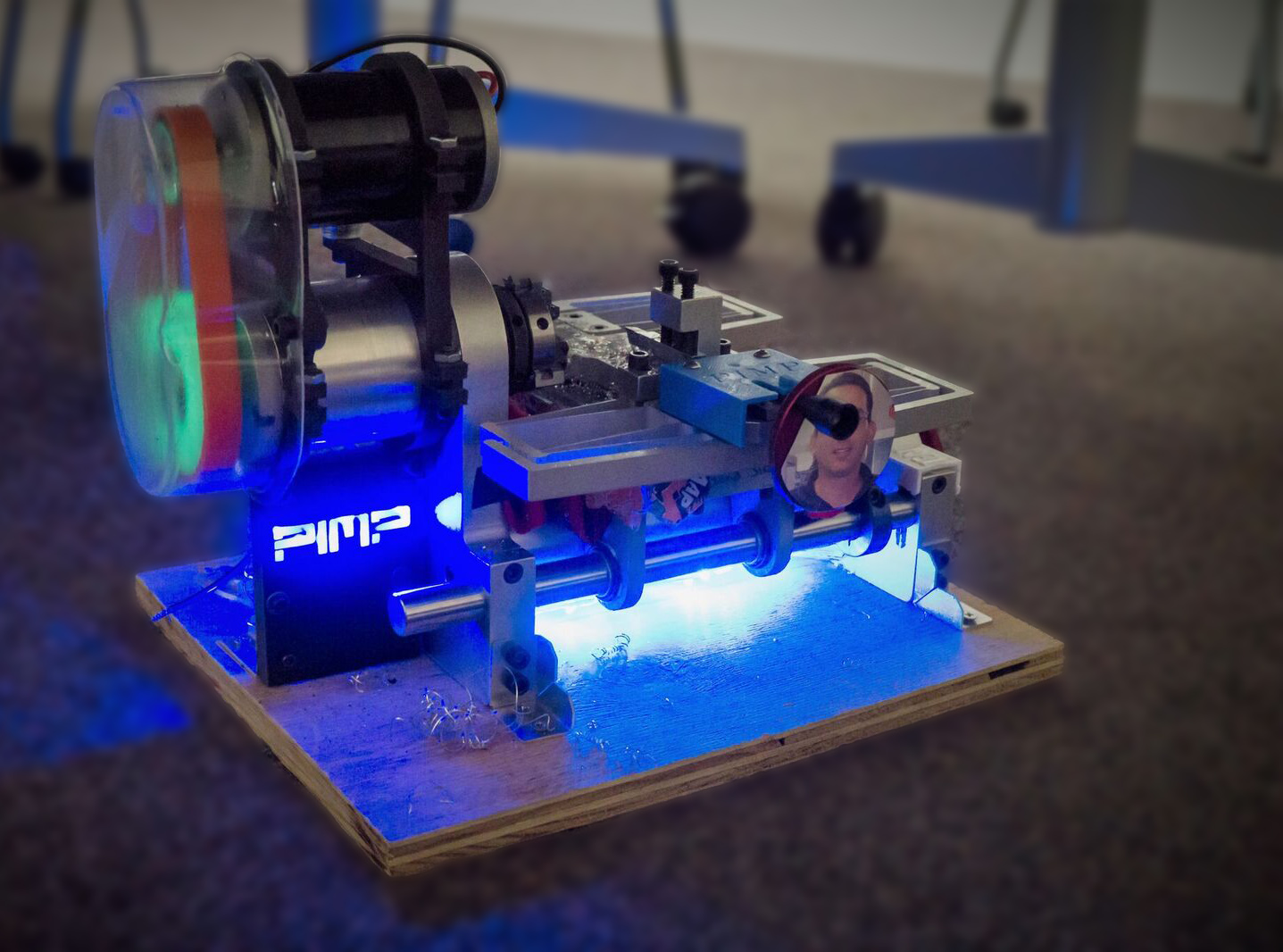
This lathe build was from the machine design class I took in undergrad. I was the FEA lead of my group.
During an undergraduate internship, I made tons of engineering models of Starshade.

Published in IEEE Robotics and Automation Letters, 2021
RFT is an empirical model of the forces on a body as it moves through sand. Its output is purely dependent on body geometry and velocity. This work extends the original 2D model to 3D using one additional internal model parameter and no additional media-specific parameters.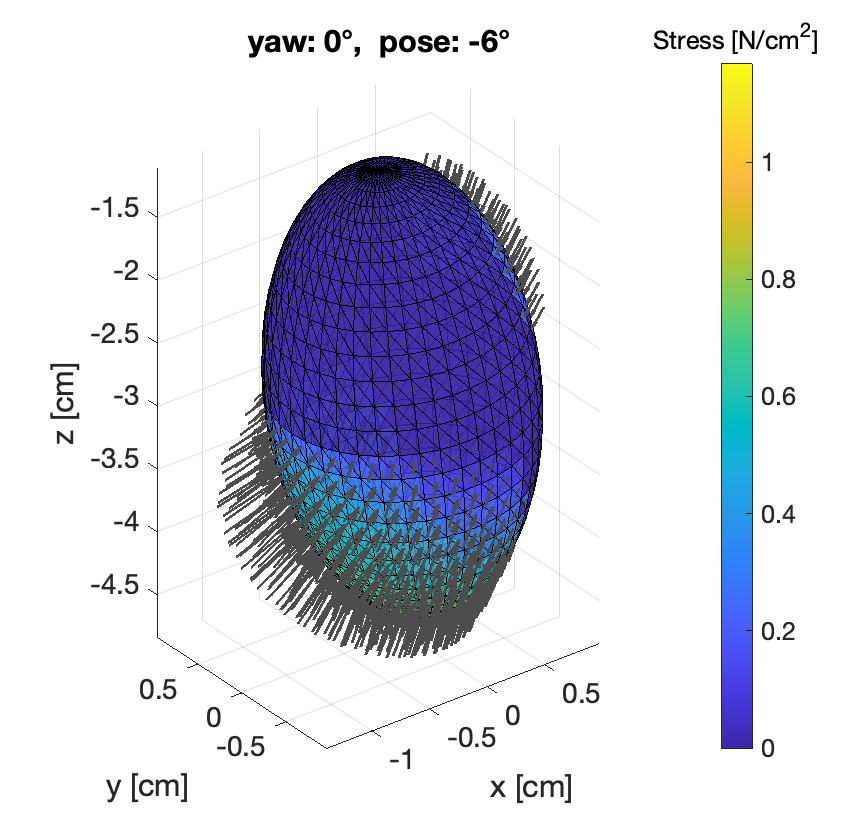
Recommended citation: L. K. Treers, C. Cao, and H. S. Stuart, “Granular Resistive Force Theory Implementation for Three-Dimensional Trajectories,” IEEE Robot. Autom. Lett., vol. 6, no. 2, pp. 1887–1894, Apr. 2021, doi: 10.1109/LRA.2021.3057052. https://ieeexplore.ieee.org/document/9345981
Published in 17th Biennial International Conference on Engineering, Science, Construction, and Operations in Challenging Environments, 2021
Control moment gyroscopes are often used for internal moment control (attitude tracking) in low gravity environments. This work models and evaluates the application of a CMG to a wheeled rover for redistributing its wheel-contact loads to better climb large obstacles.
Recommended citation: C. Cao, D. K. Lieu, and H. S. Stuart, “Dynamic Analysis of Gyroscopic Force Redistribution for a Wheeled Rover,” in Earth and Space 2021, Virtual Conference: American Society of Civil Engineers, Apr. 2021, pp. 318–327. doi: 10.1061/9780784483374.032. https://ascelibrary.org/doi/10.1061/9780784483374.032
Published in International Society for Terrain-Vehicle Systems Conference, 2021
In this work, I tested the hypothesis that different wheels should be driven at different speeds depending on their operating conditions (i.e. sinkage). Driving the back wheels faster when the resistance load is high (when towing or climbing slopes) results in slightly faster and more power efficient travel.
Recommended citation: C. Cao, C. Creager, D. K. Lieu, and H. S. Stuart, “Mobility Experiments Assessing Performance of Front-Back Differential Drive Velocity on Sandy Terrain,” in ISTVS 2021, Virtual Conference: International Society for Terrain-Vehicle Systems, Sep. 2021. https://escholarship.org/uc/item/7cw263k9
Published in IEEE Aerospace Conference, 2023
VIPER will be the first rover with an active suspension to launch on a NASA mission. This work experimentally characterizes the mobility performance of VIPER’s load-responsive suspension controller as it traverses typical terrains with different tuning parameters.
Recommended citation: C. Cao, A. Rogg, A. Tardy, “Actuated Suspension Tuning Characterization of the VIPER Lunar Rover,” in 2023 IEEE Aerospace Conference, Mar. 2023. https://ieeexplore.ieee.org/abstract/document/10115796
Published in IEEE Robotics and Automation Letters, 2023
This work validates that the load capacity of sand can be represented by a limit surface generated via RFT. Knowledge of the load direction also allows one to estimate the resulting direction of displacement once media failure occurs.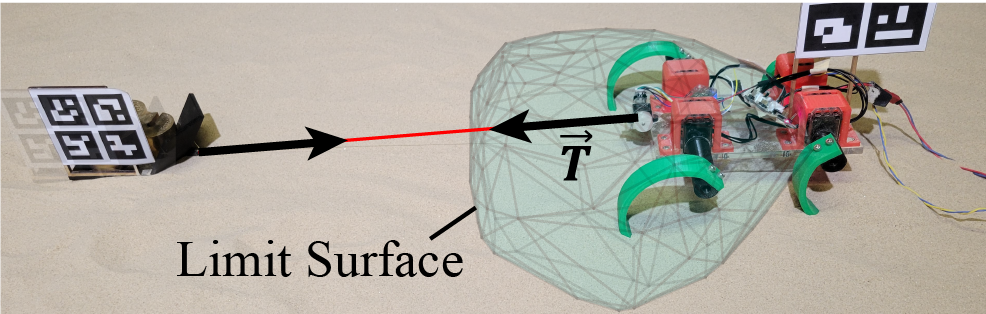
Recommended citation: T. M. Huh, C. Cao, J. Aderibigbe, D. Moon, and H. S. Stuart, “Walk-Burrow-Tug: Legged anchoring analysis using RFT-based granular limit surfaces,” IEEE Robot. Autom. Lett., Apr. 2023, doi: 10.1109/LRA.2023.3269324. https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=10106433
Published in , 2023
Rovers with articulated suspensions can achieve greater slope-climbing efficiency, and this work characterizes how the coordination of driving and suspension control affects performance, achieving up to an 8x reduction in power consumption on 20° slopes.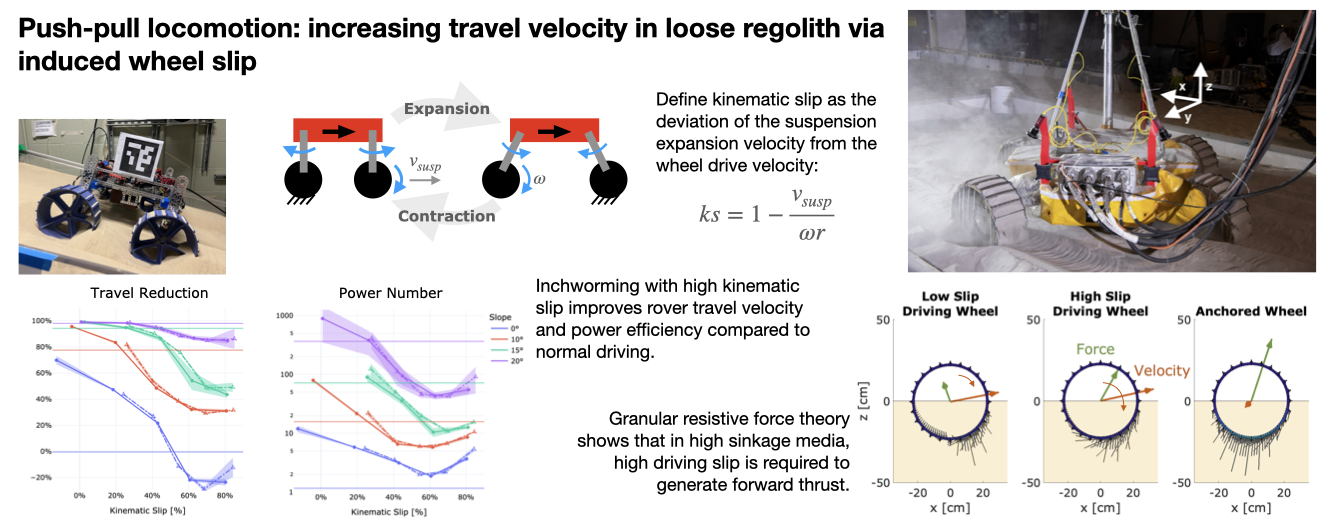
Recommended citation: C. Cao, D. Moon, C. Creager, D. K. Lieu, H. S. Stuart, “Push-pull locomotion: Increasing travel velocity in loose regolith via induced wheel slip.” (Under review by Journal of Terramechanics.)
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.