Walk‐Burrow‐Tug: Legged anchoring analysis using RFT‐based granular limit surfaces
Published in IEEE Robotics and Automation Letters, 2023
Recommended citation: T. M. Huh, C. Cao, J. Aderibigbe, D. Moon, and H. S. Stuart, “Walk-Burrow-Tug: Legged anchoring analysis using RFT-based granular limit surfaces,” IEEE Robot. Autom. Lett., Apr. 2023, doi: 10.1109/LRA.2023.3269324. https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=10106433
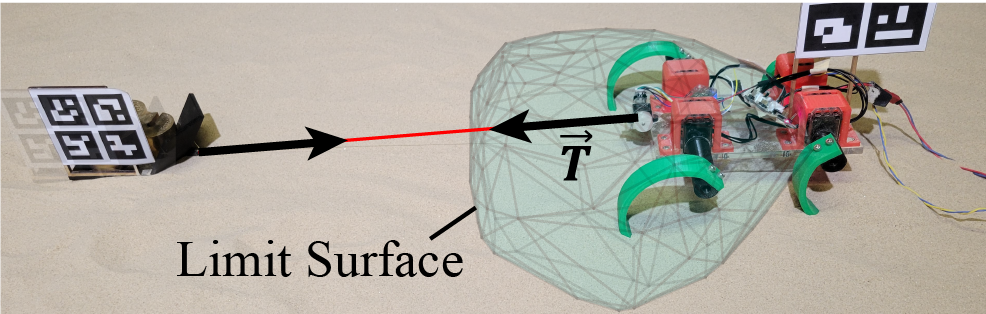
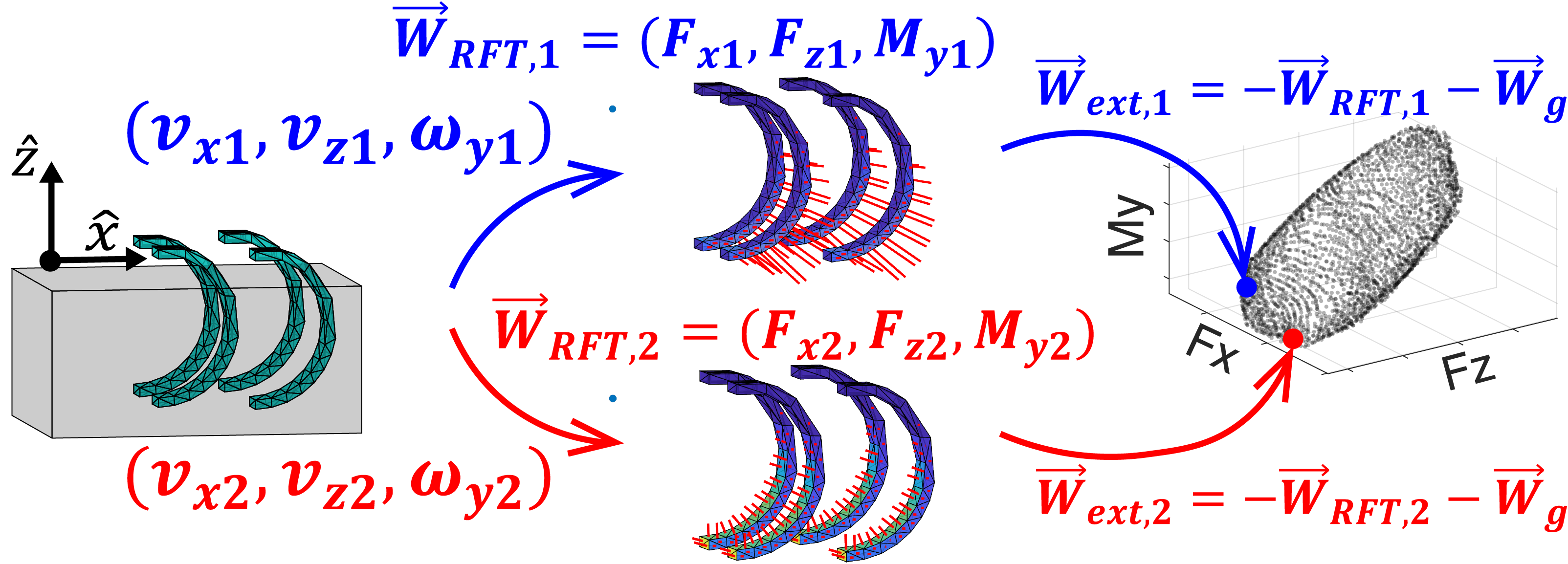
We develop a new resistive force theory based granular limit surface (RFT-GLS) method to predict and guide behaviors of forceful ground robots. As a case study, we harness a small mobile robotic system - MiniRQuad (296g) - to ‘walk-burrow-tug;’ it actively exploits ground anchoring by burrowing its legs to tug loads. RFT-GLS informs the selection of efficient strategies to transport sleds with varying masses. The granular limit surface (GLS), a wrench boundary that separates stationary and kinetic behavior, is computed using 3D resistive force theory (RFT) for a given body and set of motion twists. This limit surface is then used to predict the quasi-static trajectory of the robot when it fails to withstand an external load. We find that the RFT-GLS enables accurate force and motion predictions in laboratory tests. For control applications, a pre-composed state space map of the twist-wrench pairs enables computationally efficient simulations to improve robotic anchoring strategies.