Publications
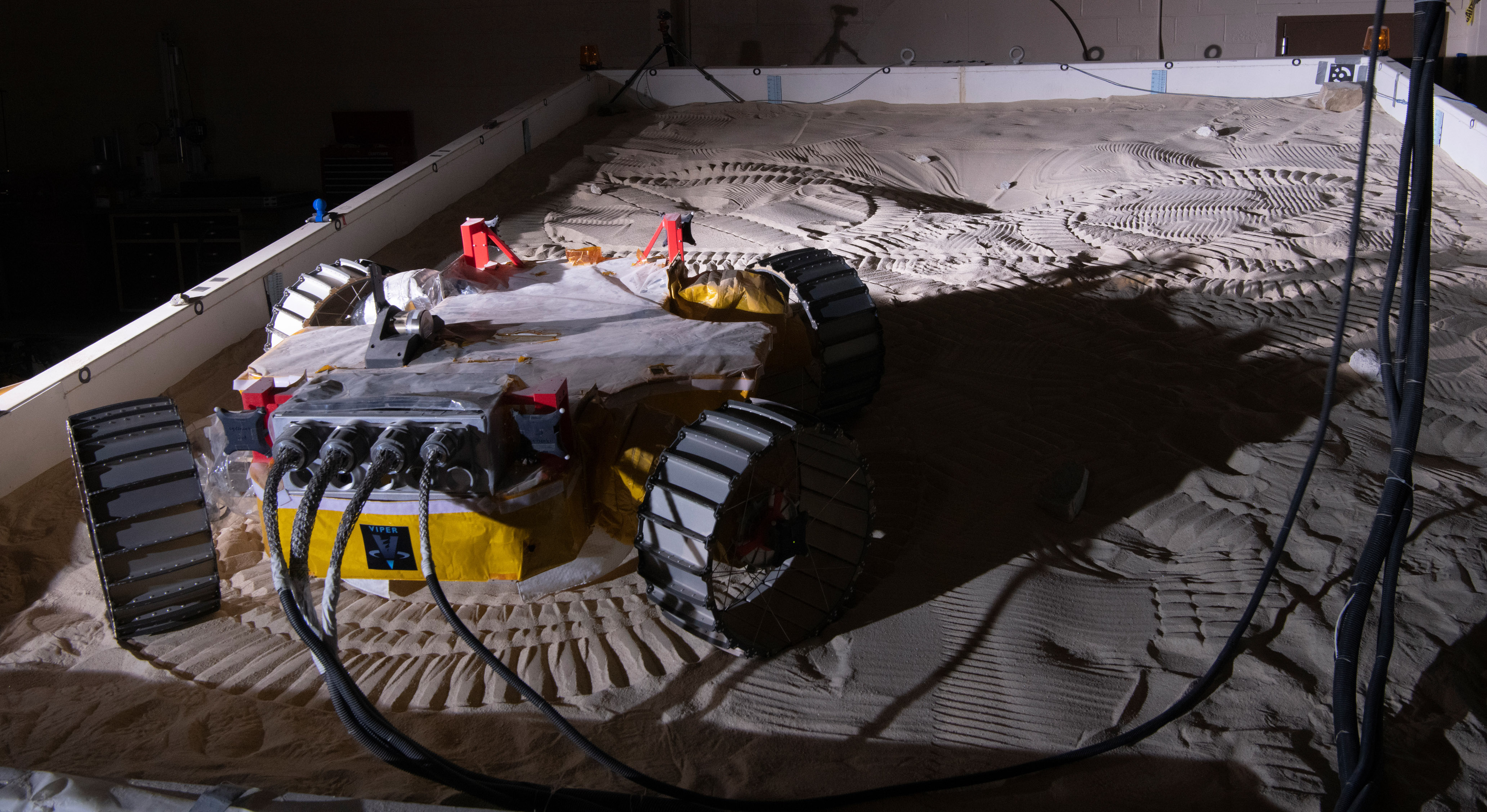
Planetary rovers have a history of entrapment in soft Martian sand, which is difficult to visually anticipate and results in high-stakes extrication efforts. NASA will soon return to the moon to scout for water ice and other resources in polar craters, which may be composed of sloped loose regolith. As scientific objectives on Mars evolve and interest in lunar exploration increases, the need to traverse loose, sandy terrain incentivizes the design of more energy-efficient locomotion suspensions and gaits. To tackle this challenge, I investigated the effects of weight distribution and induced wheel slip on mobility using miniature rovers in the lab and the Volatiles Investigating Polar Exploration Rover (VIPER) mobility representative rover at NASA.
Key words: planetary rover, field robotics, sandy slopes, granular resistive force theory, wheel-terrain interaction
Click on the paper titles for more information and images.
Published in , 2023
Rovers with articulated suspensions can achieve greater slope-climbing efficiency, and this work characterizes how the coordination of driving and suspension control affects performance, achieving up to an 8x reduction in power consumption on 20° slopes.
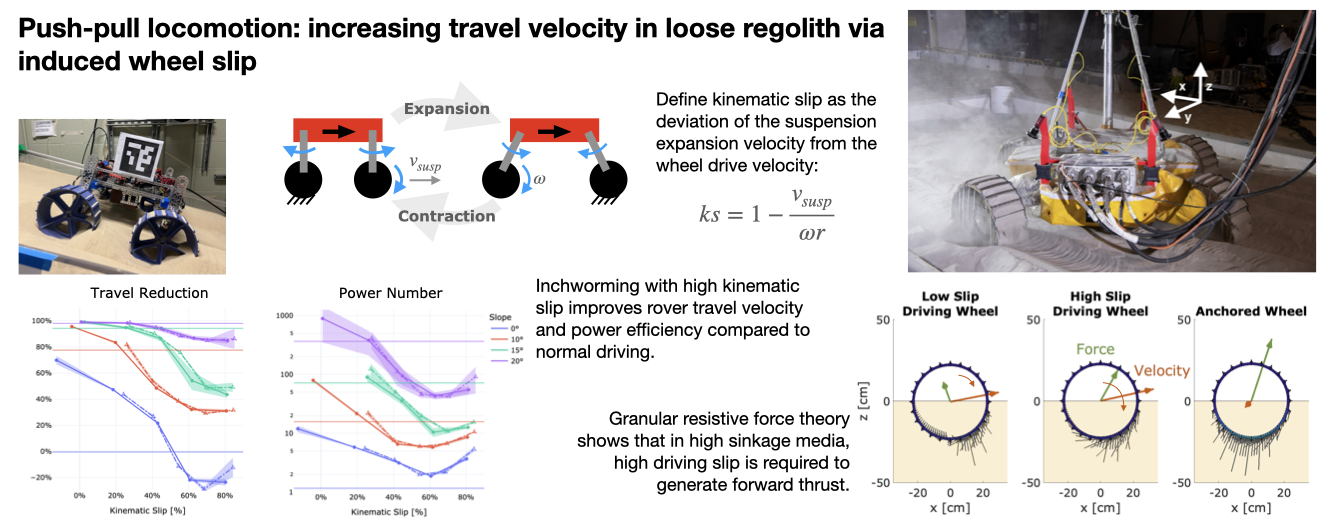
Recommended citation: C. Cao, D. Moon, C. Creager, D. K. Lieu, H. S. Stuart, “Push-pull locomotion: Increasing travel velocity in loose regolith via induced wheel slip.” (Under review by Journal of Terramechanics.)
Published in IEEE Robotics and Automation Letters, 2023
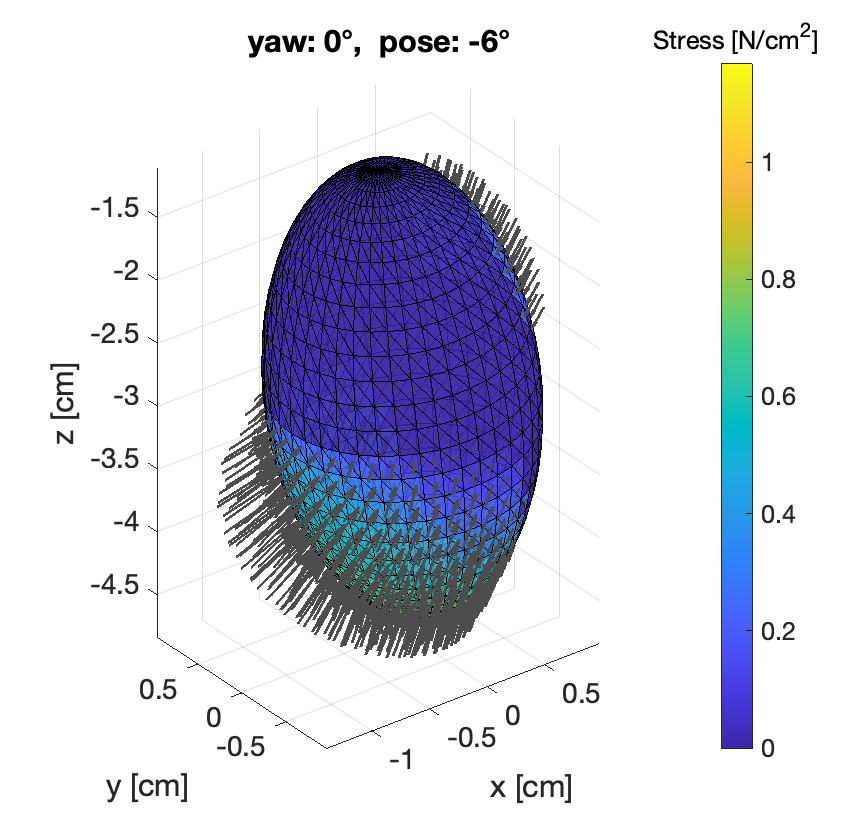
This work validates that the load capacity of sand can be represented by a limit surface generated via RFT. Knowledge of the load direction also allows one to estimate the resulting direction of displacement once media failure occurs.
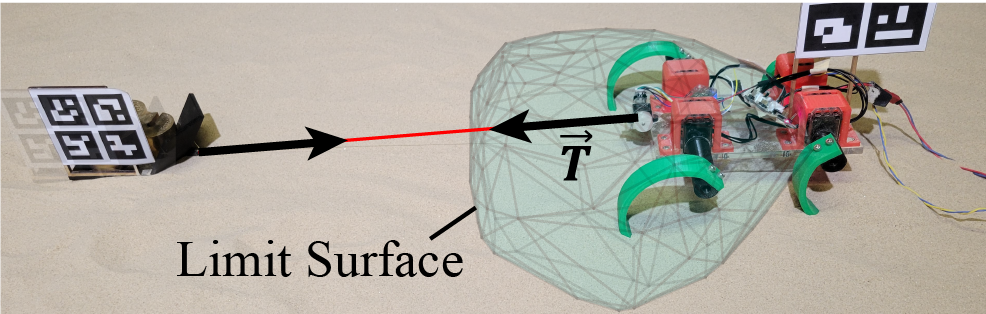
Recommended citation: T. M. Huh, C. Cao, J. Aderibigbe, D. Moon, and H. S. Stuart, “Walk-Burrow-Tug: Legged anchoring analysis using RFT-based granular limit surfaces,” IEEE Robot. Autom. Lett., Apr. 2023, doi: 10.1109/LRA.2023.3269324. https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=10106433
Published in IEEE Aerospace Conference, 2023
VIPER will be the first rover with an active suspension to launch on a NASA mission. This work experimentally characterizes the mobility performance of VIPER’s load-responsive suspension controller as it traverses typical terrains with different tuning parameters.

Recommended citation: C. Cao, A. Rogg, A. Tardy, “Actuated Suspension Tuning Characterization of the VIPER Lunar Rover,” in 2023 IEEE Aerospace Conference, Mar. 2023. https://ieeexplore.ieee.org/abstract/document/10115796
Published in International Society for Terrain-Vehicle Systems Conference, 2021
In this work, I tested the hypothesis that different wheels should be driven at different speeds depending on their operating conditions (i.e. sinkage). Driving the back wheels faster when the resistance load is high (when towing or climbing slopes) results in slightly faster and more power efficient travel.
Recommended citation: C. Cao, C. Creager, D. K. Lieu, and H. S. Stuart, “Mobility Experiments Assessing Performance of Front-Back Differential Drive Velocity on Sandy Terrain,” in ISTVS 2021, Virtual Conference: International Society for Terrain-Vehicle Systems, Sep. 2021. https://escholarship.org/uc/item/7cw263k9
Published in 17th Biennial International Conference on Engineering, Science, Construction, and Operations in Challenging Environments, 2021
Control moment gyroscopes are often used for internal moment control (attitude tracking) in low gravity environments. This work models and evaluates the application of a CMG to a wheeled rover for redistributing its wheel-contact loads to better climb large obstacles.
Recommended citation: C. Cao, D. K. Lieu, and H. S. Stuart, “Dynamic Analysis of Gyroscopic Force Redistribution for a Wheeled Rover,” in Earth and Space 2021, Virtual Conference: American Society of Civil Engineers, Apr. 2021, pp. 318–327. doi: 10.1061/9780784483374.032. https://ascelibrary.org/doi/10.1061/9780784483374.032
Published in IEEE Robotics and Automation Letters, 2021
RFT is an empirical model of the forces on a body as it moves through sand. Its output is purely dependent on body geometry and velocity. This work extends the original 2D model to 3D using one additional internal model parameter and no additional media-specific parameters.
Recommended citation: L. K. Treers, C. Cao, and H. S. Stuart, “Granular Resistive Force Theory Implementation for Three-Dimensional Trajectories,” IEEE Robot. Autom. Lett., vol. 6, no. 2, pp. 1887–1894, Apr. 2021, doi: 10.1109/LRA.2021.3057052. https://ieeexplore.ieee.org/document/9345981
